
빠른 링크






 |
유형 | 하이브리드 스테퍼 모터 | 기동 순서 | |||||||||||||||||||
| 플랜지 크기 | 60mm 정사각형 | |||||||||||||||||||||
| 상수 | 2 | |||||||||||||||||||||
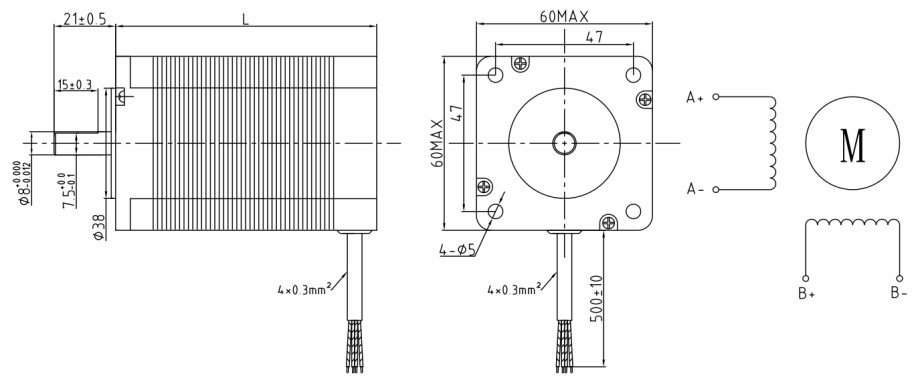
| 발걸음 정확성 | ±5% | 단계 | A+ | B+ | A- | B- | ||||||||||||||||
| 방사력 | 70N(15.5파운드) 샤프트 끝부분에서 | |||||||||||||||||||||
| IP 등급 | ip40 | 1 | + | + | - | - | ||||||||||||||||
| 작동 온도 | -20°C 부터 +50 °C | 2 | - | + | + | - | ||||||||||||||||
| 단열계급 | B, 130 °C | 3 | - | - | + | + | ||||||||||||||||
| 절연 저항 | 100 MΩ | 씨와이 | 4 | + | - | - | + | 반시계방향(CCW) | ||||||||||||||
| 크기 (mm) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| 기술 데이터 | ||||||||||||||||||||||
| 모델 | 발걸음 각도 | 모터 길이가 | 전류 | 저항 | 인덕턴스 | 유지 모터 | 클릭 토크 | 관성 | 전선 | 무게 | ||||||||||||
| (° ) | L(mm) | (A) | (Ω) | (mH) | (N.m) | (N.cm) | (g.cm²) | (개수) | (kg) | |||||||||||||
| TH6045HS-25004 | 1.8 | 45 | 2.50 | 1.00 | 2.2 | 0.85 | 3.0 | 200.0 | 4 | 0.55 | ||||||||||||
| TH6056HS-25004 | 1.8 | 56 | 2.50 | 1.30 | 4.2 | 1.60 | 4.0 | 350.0 | 4 | 0.70 | ||||||||||||
| TH6056HS-42004 | 1.8 | 56 | 4.20 | 0.40 | 1.2 | 1.60 | 4.0 | 350.0 | 4 | 0.70 | ||||||||||||
| TH6065HS-30004 | 1.8 | 65 | 3.00 | 0.80 | 2.3 | 1.80 | 5.0 | 450.0 | 4 | 0.85 | ||||||||||||
| TH6065HS-42004 | 1.8 | 65 | 4.20 | 0.55 | 1.2 | 1.80 | 5.0 | 450.0 | 4 | 0.85 | ||||||||||||
| TH6076HS-25004 | 1.8 | 76 | 2.50 | 1.80 | 6.5 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6076HS-30004 | 1.8 | 76 | 3.00 | 1.00 | 3.5 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6076HS-42004 | 1.8 | 76 | 4.20 | 0.60 | 1.8 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6089HS-30004 | 1.8 | 89 | 3.00 | 1.40 | 5.5 | 2.60 | 12.0 | 780.0 | 4 | 1.40 | ||||||||||||
| TH6089HS-42004 | 1.8 | 89 | 4.20 | 0.70 | 2.8 | 2.60 | 12.0 | 780.0 | 4 | 1.40 | ||||||||||||
| TH60100HS-42004 | 1.8 | 100 | 4.20 | 0.70 | 3.0 | 3.00 | 16.0 | 900.0 | 4 | 1.60 | ||||||||||||
| TH60112HS-42004 | 1.8 | 112 | 4.20 | 0.85 | 3.5 | 3.60 | 16.0 | 900.0 | 4 | 1.80 | ||||||||||||
| 토크 단위 변환: 1N.m≈10.2kgf.cm≈141.6oz.in≈8.85lb.in | ||||||||||||||||||||||
| 다른 매개변수가 필요하면 고객 서비스에 문의하십시오. | ||||||||||||||||||||||
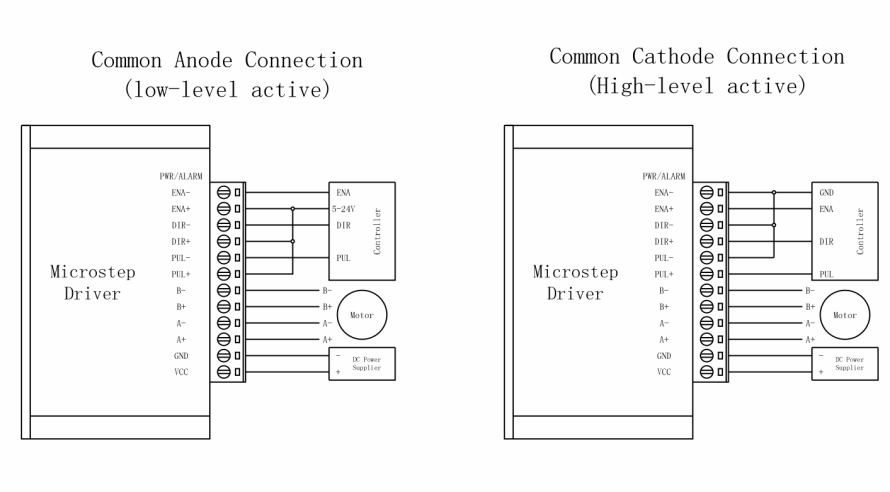
| 모터 드라이버 연결 | ||||||||||||||||||||||
| ||||||||||||||||||||||

TJX36R3650BL

TJX38RGb

TJX38RGa

TJX36RGb
