






 |
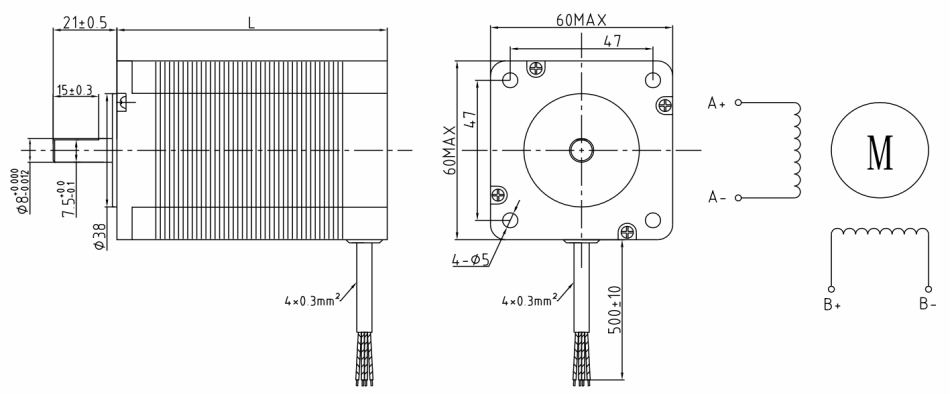
タイプ | ハイブリッドステップモーター | 励磁シーケンス | |||||||||||||||||||
| フランジサイズ | 60mm角 | |||||||||||||||||||||
| 位相 | 2 | |||||||||||||||||||||
| ステップ精度 | ±5% | ステップ | A+ | B+ | ほら | B- | ||||||||||||||||
| 径方向力 | シャフト先端で70N(15.5Lbs.) | |||||||||||||||||||||
| IP等級 | ip40 | 1 | + | + | - | - | ||||||||||||||||
| 動作温度 | -20°C ~+50 °C | 2 | - | + | + | - | ||||||||||||||||
| 隔熱クラス | B、130 °C | 3 | - | - | + | + | ||||||||||||||||
| 隔熱抵抗 | 100 MΩ | 翻訳 | 4 | + | - | - | + | 反時計回り | ||||||||||||||
| 寸法(mm) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| 技術データ | ||||||||||||||||||||||
| モデル | ステップアングル | 運動器の長さ | 現在 | 抵抗 | インダクタンス | 保持トルク | クリックトルク | 慣性 | ワイヤ | 重量 | ||||||||||||
| (° ) | ほら ほら | (A) | (Ω) | (mH) | (N・m) | (N・cm) | (g・cm²) | (本数) | 体重 | |||||||||||||
| TH6045HS-25004 | 1.8 | 45 | 2.50 | 10.00 | 22.0 | 0.55 | 2.5 | 150.0 | 4 | 0.47 | ||||||||||||
| TH6056HS-25004 | 1.8 | 56 | 2.50 | 1.30 | 2.8 | 0.55 | 2.5 | 150.0 | 4 | 0.47 | ||||||||||||
| TH6056HS-42004 | 1.8 | 56 | 4.20 | 12.00 | 26.0 | 0.80 | 2.8 | 190.0 | 4 | 0.52 | ||||||||||||
| TH6065HS-30006 | 1.8 | 65 | 3.00 | 6.80 | 9.2 | 0.62 | 3.0 | 230.0 | 6 | 0.59 | ||||||||||||
| TH6065HS-42004 | 1.8 | 65 | 4.20 | 0.85 | 2.1 | 0.90 | 3.0 | 230.0 | 4 | 0.59 | ||||||||||||
| TH6076HS-25006 | 1.8 | 76 | 2.50 | 3.20 | 5.5 | 0.90 | 3.5 | 280.0 | 6 | 0.68 | ||||||||||||
| TH6076HS-30004 | 1.8 | 76 | 3.00 | 1.30 | 4.0 | 1.10 | 3.5 | 280.0 | 4 | 0.68 | ||||||||||||
| TH6076HS-42004 | 1.8 | 76 | 4.20 | 0.40 | 1.3 | 1.10 | 3.5 | 280.0 | 4 | 0.68 | ||||||||||||
| TH6089HS-30004 | 1.8 | 89 | 3.00 | 7.50 | 20.0 | 1.40 | 5.0 | 380.0 | 4 | 0.85 | ||||||||||||
| TH6089HS-42004 | 1.8 | 89 | 4.20 | 1.30 | 2.0 | 1.40 | 5.0 | 380.0 | 4 | 0.85 | ||||||||||||
| TH60100HS-42004 | 1.8 | 100 | 4.20 | 1.20 | 4.3 | 1.80 | 6.0 | 440.0 | 4 | 1.05 | ||||||||||||
| TH60112HS-42004 | 1.8 | 112 | 4.20 | 0.55 | 1.8 | 1.80 | 6.0 | 440.0 | 4 | 1.05 | ||||||||||||
| トルク単位変換: 1N・m≈10.2kgf・cm≈141.6oz・in≈8.85lb・in | ||||||||||||||||||||||
| 他のパラメータが必要な場合は、カスタマーサービスまでご連絡ください。 | ||||||||||||||||||||||
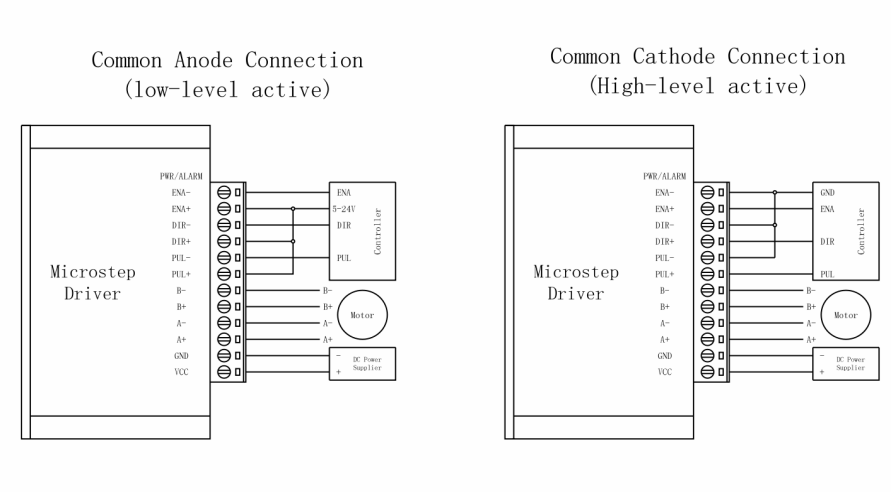
| モータードライバ接続 | ||||||||||||||||||||||
| ||||||||||||||||||||||

試験用 試験用 試験用

試験用 試験用 試験用

TJX38RGa

TJX36R3650BL 試料の種類
