
Գրիգ Հղումներ






Nema 11 երկու փазային շարժարանի դիսկետ առանց կենտրոնական առանցքի 24nm շարժարան Nema 11 Long d Shaft-ի համար մինի ռոբոտի համար
 |
ՏԻՊ | հիբրիդային քայլային շարժիչ | Ընթացիչ հաջորդականություն | |||||||||||||||||||
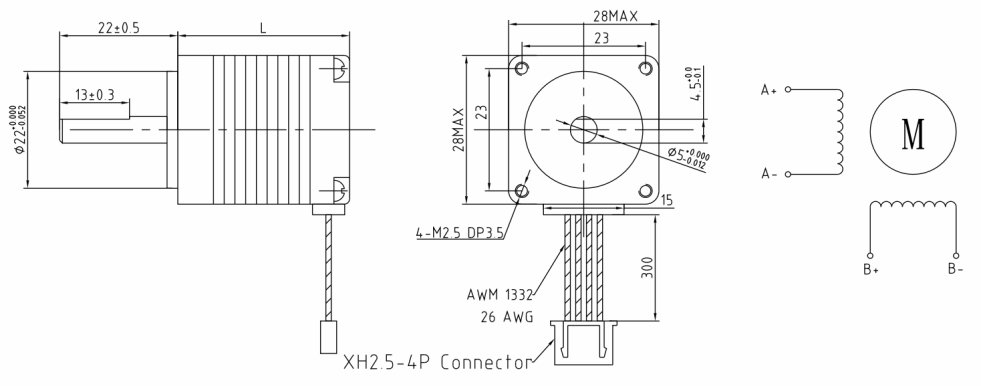
| Կցաշուրթի չափը | 28 մմ քառակուսի | |||||||||||||||||||||
| Ֆազեր | 2 | |||||||||||||||||||||
| Քայլի ճշգրտություն | ±5% | քայլ | A+ | Բ+ | Ա- | Բ- | ||||||||||||||||
| Ռադիուսային ուժ | 30N(6.5Lbs.) ավարտական առանցքում | |||||||||||||||||||||
| IP դասակարգում | IP40 | 1 | + | + | - | - | ||||||||||||||||
| Օպերացիոն ջերմաստիճան | -20℃ մինուս 50-ից +50 ℃ | 2 | - | + | + | - | ||||||||||||||||
| Բացառման դաս | Բ, 130 ℃ | 3 | - | - | + | + | ||||||||||||||||
| Բացառման դիմադրություն | 100 MΩ | CW | 4 | + | - | - | + | CCW | ||||||||||||||
| չափսեր (մմ) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| Տեխնիկական տվյալներ | ||||||||||||||||||||||
| Մոդել | Քայլի անկյուն | Մոտորի երկարությունը | Ներկայիս | դիմադրություն | Հանդիպման հոդերի | Պահպանման զարկային ուժ | Դետենտ ուժ | Իներցիա | լարեր | Քաշը | ||||||||||||
| (° ) | L(մմ) | (A) | (Ω) | (mH) | (N.m) | (N.cm) | (գ.սմ²) | (no.) | գ) | |||||||||||||
| TH2828HS-6004 | 1.8 | 28 | 0.60 | 4.2 | 2.2 | 0.045 | 0.3 | 6.0 | 4 | 105 | ||||||||||||
| TH2833HS-3504 | 1.8 | 33 | 0.35 | 15.0 | 9.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2833HS-6004 | 1.8 | 33 | 0.60 | 5.5 | 3.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2845HS-7004 | 1.8 | 45 | 0.70 | 7.0 | 5.0 | 0.080 | 0.6 | 11.0 | 4 | 140 | ||||||||||||
| TH2845HS-9506 | 1.8 | 45 | 0.95 | 3.4 | 1.2 | 0.060 | 0.6 | 11.0 | 6 | 140 | ||||||||||||
| TH2851HS-6004 | 1.8 | 51 | 0.60 | 9.0 | 7.2 | 0.100 | 0.8 | 13.0 | 4 | 180 | ||||||||||||
| TH2851HS-9306 | 1.8 | 51 | 0.93 | 4.6 | 1.8 | 0.080 | 0.8 | 13.0 | 6 | 180 | ||||||||||||
| Տորքի միավորների տեղափոխում. 1N.m≈10.2կգf.սմ≈141.6oz.դյույմ≈8.85lb.դյույմ | ||||||||||||||||||||||
| Եթե ձեզ հարկավոր են այլ պարամետրեր, խնդրում ենք կապվել գործընկերության հետ. | ||||||||||||||||||||||
| Դրավի դիրքային կապեր | ||||||||||||||||||||||
| ||||||||||||||||||||||

TJX36R3650BL

TJX36RGb

TJX38RGb

TJX38RGa
