
Γρήγορα Δεδομένα





Factories OD32 gear motor 12v 3v 24v 10kgcm 20kgcm low rpm 60rpm 50rpm 2w 3w micro rs385 brushed dc planetary gear motor ce rohs
| Κύκλος τροχιάς πλανητικού συστήματος DC Διρεκτό πλανητικό μοτόρας μείωσης ταχύτητας | 7.5 Nm | 5 Watts | |||||||||||||||||||
| RS385 Micro brushed dc motor with planetary gearbox | Για συνδυασμό με | ||||||||||||||||||||
| Encoder με αισθητήρα Hall | |||||||||||||||||||||
| Μπορεί να συνδυαστεί με μαγνητικό κωδικοποιητή | |||||||||||||||||||||
| Σειρά TJX32RL | |||||||||||||||||||||
| Ζωγραφικό Σχέδιο Σχέδιο εξωτερικών διαστάσεων (χιλ) | |||||||||||||||||||||
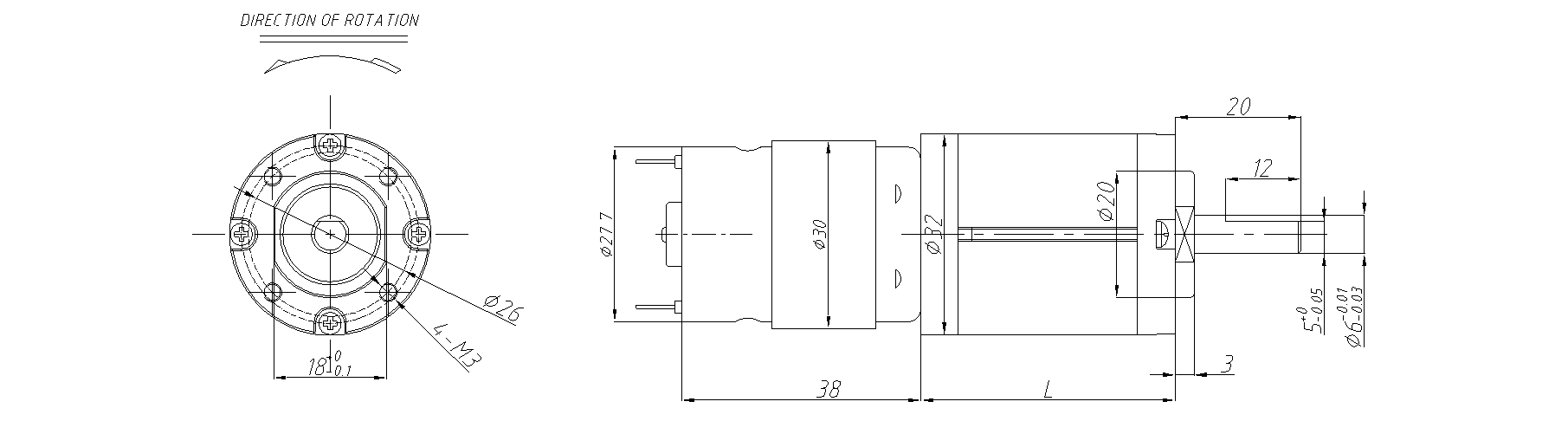 | |||||||||||||||||||||
| Εικόνα μοτόρα Φωτογραφία πραγματικού μοτέρ | |||||||||||||||||||||
 | |||||||||||||||||||||
| Χαρακτηριστικά μοτέρ Ιδιότητες μοτέρ | |||||||||||||||||||||
| Υλικό στεγαστήρα Υλικό εγκατάστασης | Κράμα ψευδαργύρου Ζινκόχαλκη συμπεπλοκή | ||||||||||||||||||||
| Υλικό ζαχαροπλοΐου Υλικό ράντα | Μεταλλουργία Πυλέων Πυθμενική μεταλλευσία | ||||||||||||||||||||
| Αντιστροφή Ροδιοειδές παράθυρο | ≤2° | ||||||||||||||||||||
| Κολοβόρα στον άξονα εξόδου Κολοβόρα άξονα εξόδου | Κυλινδρικά Αντίφραση Σφαιρική κολοβόρα | ||||||||||||||||||||
| Προτεινόμενη μέγιστη ταχύτητα εισόδου Προτεινόμενη μέγιστη ταχύτητα εισόδου | ≤10000ΣΤ/Λ | ||||||||||||||||||||
| Ακτινοβαθμός Δύναμης Ραδιακή δύναμη | ≤6kgf | ||||||||||||||||||||
| Αξονική δύναμη Αξονική δύναμη | ≤3kgf | ||||||||||||||||||||
| Μέγιστη πίεση δύναμης στον αξόνα Μέγιστη πίεση δύναμης που μπορεί να υποφέρει ο κύριος αξόνας | ≤13kgf | ||||||||||||||||||||
| Ραδιακό κενό Ραδιακό κενό | ≤0,1 χλστ | ||||||||||||||||||||
| Αξονικό κενό Αξονικό κενό | ≤0.3mm | ||||||||||||||||||||
| Εύρος θερμοκρασίας λειτουργίας Ωθημένος όροφος θερμοκρασίας | -20℃ -120℃ | ||||||||||||||||||||
| Κομμυτάτορας Δομή αντιστροφής | Βουρτσισμένο | ||||||||||||||||||||
| Κατεύθυνση περιστροφής Κατεύθυνση περιστροφής | CW / CCW | ||||||||||||||||||||
| Θόρυβος Θόρυβος | ≤ 55dB | ||||||||||||||||||||
| Τεχνικά δεδομένα DC Motor Παράμετροι άμεσου τροχαλιασμού μοτόρα | |||||||||||||||||||||
| Μετρήσεις σε 25-30 ℃ Αποτιμήσεις μετρήσεων σε δωμάτιο κλιματοποίησης | |||||||||||||||||||||
|
Μοντέλο 型号 |
Διάταξη (V ) Νομική Τάση |
Χωρίς Φορτίο Παράμετροι Χωρίς Φορτίο |
Αξιολογημένη Νομικοί Παράμετροι |
Στάλαγμα Παράμετροι Στάλαγμα |
*Συμβουλές: Οι παραγωγικές φύλλα στα αριστερά είναι περιορισμένα, παρακαλώ επικοινωνήστε με το προσωπικό μας για περισσότερες πληροφορίες σχετικά με παράμετρους. Συμβουλή: Οι παράμετροι του πίνακα δεδομένων αριστερά είναι περιορισμένοι, επικοινωνήστε με την υπηρεσία πελατών για περισσότερες πληροφορίες. |
||||||||||||||||
|
Ταχύτητα Ταχύτητα |
Τρέχουσα Ρεύμα |
Ταχύτητα Ταχύτητα |
Τρέχουσα Ρεύμα |
Στροφή Ροπή |
Έξοδος Έξισος ενέργειας |
Eff Αποδοτικότητα |
Στροφή Ροπή |
Τρέχουσα Ρεύμα |
|||||||||||||
| σ.α.λ. | Μαμά | σ.α.λ. | Α | mN.m | W | % | mN.m | Α | |||||||||||||
| RS385 | 12 | 4600 | 110 | 3680 | 0.25 | 4.98 | 1.92 | 64.83 | 14.94 | 0.98 | |||||||||||
| RS385 | 24 | 5500 | 55 | 4400 | 0.15 | 5.10 | 2.35 | 64.20 | 15.30 | 0.84 | |||||||||||
| Τεχνικά δεδομένα μοτόρα με γεαρμό Παράμετροι μοτόρα με γεαρμό | |||||||||||||||||||||
| Δεδομένα γεαρμού Παράμετροι γεαρμού | |||||||||||||||||||||
|
Αναλογία κιβωτίου Λόγος μείωσης n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Αριθμός σταδίων τροχαλιών Βαθμοί μειώσεως |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Μήκος κιβωτίου τροχαλιών Μήκος κιβωτίου τροχαλιών (χιλ) |
21.4 | 21.4 | 27.7 | 27.7 | 27.7 | 34 | 34 | 34 | 34 | 40.4 | 40.4 | 40.4 | 40.4 | 40.4 | 46.7 | 46.7 | 46.7 | 46.7 | 46.7 | ||
|
Αποτελεσματικότητα Αποδοτικότητα (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| RS385-12V-4600R | |||||||||||||||||||||
|
ταχύτητα χωρίς φορτίο Ταχύτητα χωρίς φορτίο (rpm) |
1243.2 | 884.6 | 335.8 | 239.6 | 171.0 | 90.2 | 64.8 | 46.0 | 33.1 | 24.3 | 17.4 | 12.5 | 9.0 | 6.4 | 4.7 | 3.4 | 2.4 | 1.7 | 1.3 | ||
|
Ονομαστική Ταχύτητα Νομιμή ταχύτητα (rpm) |
994.6 | 707.7 | 268.6 | 191.7 | 136.8 | 72.2 | 51.8 | 36.8 | 26.5 | 19.5 | 13.9 | 10.0 | 7.2 | 5.1 | 3.8 | 2.7 | 1.9 | 1.4 | 1.0 | ||
|
Ονομαστική ροπή Νομιμή ροπή (Ν.μ) |
0.016 | 0.022 | 0.049 | 0.069 | 0.097 | 0.156 | 0.217 | 0.306 | 0.425 | 0.491 | 0.686 | 0.959 | 1.331 | 1.874 | 2.159 | 3.021 | 4.223 | 5.904 | 7.500 | ||
|
Ονομαστική ροπή Νομιμή ροπή (KG.CM) |
0.15 | 0.22 | 0.48 | 0.68 | 0.95 | 1.53 | 2.13 | 3.00 | 4.17 | 4.81 | 6.73 | 9.40 | 13.04 | 18.37 | 21.16 | 29.60 | 41.38 | 57.86 | 73.50 | ||
|
Ονομαστική ροπή Νομιμή ροπή (LB.IN) |
0.18 | 0.25 | 0.56 | 0.78 | 1.09 | 1.76 | 2.45 | 3.45 | 4.80 | 5.55 | 7.75 | 10.83 | 15.03 | 21.16 | 24.37 | 34.10 | 47.68 | 66.66 | 84.68 | ||
| RS385-24V-5500R | |||||||||||||||||||||
|
ταχύτητα χωρίς φορτίο Ταχύτητα χωρίς φορτίο (rpm) |
1486.5 | 1057.7 | 401.5 | 286.5 | 204.5 | 107.8 | 77.5 | 55.0 | 39.6 | 29.1 | 20.8 | 14.9 | 10.7 | 7.6 | 5.6 | 4.0 | 2.9 | 2.1 | 1.5 | ||
|
Ονομαστική Ταχύτητα Νομιμή ταχύτητα (rpm) |
1189.2 | 846.2 | 321.2 | 229.2 | 163.6 | 86.3 | 62.0 | 44.0 | 31.7 | 23.3 | 16.7 | 11.9 | 8.6 | 6.1 | 4.5 | 3.2 | 2.3 | 1.6 | 1.2 | ||
|
Ονομαστική ροπή Νομιμή ροπή (Ν.μ) |
0.016 | 0.023 | 0.050 | 0.071 | 0.099 | 0.160 | 0.222 | 0.313 | 0.435 | 0.503 | 0.703 | 0.982 | 1.363 | 1.919 | 2.211 | 3.093 | 4.324 | 6.046 | 7.500 | ||
|
Ονομαστική ροπή Νομιμή ροπή (KG.CM) |
0.16 | 0.22 | 0.49 | 0.69 | 0.97 | 1.57 | 2.18 | 3.07 | 4.27 | 4.93 | 6.89 | 9.63 | 13.36 | 18.81 | 21.67 | 30.32 | 42.38 | 59.26 | 73.50 | ||
|
Ονομαστική ροπή Νομιμή ροπή (LB.IN) |
0.18 | 0.25 | 0.57 | 0.80 | 1.12 | 1.80 | 2.51 | 3.54 | 4.92 | 5.68 | 7.94 | 11.09 | 15.39 | 21.67 | 24.96 | 34.93 | 48.83 | 68.27 | 84.68 | ||
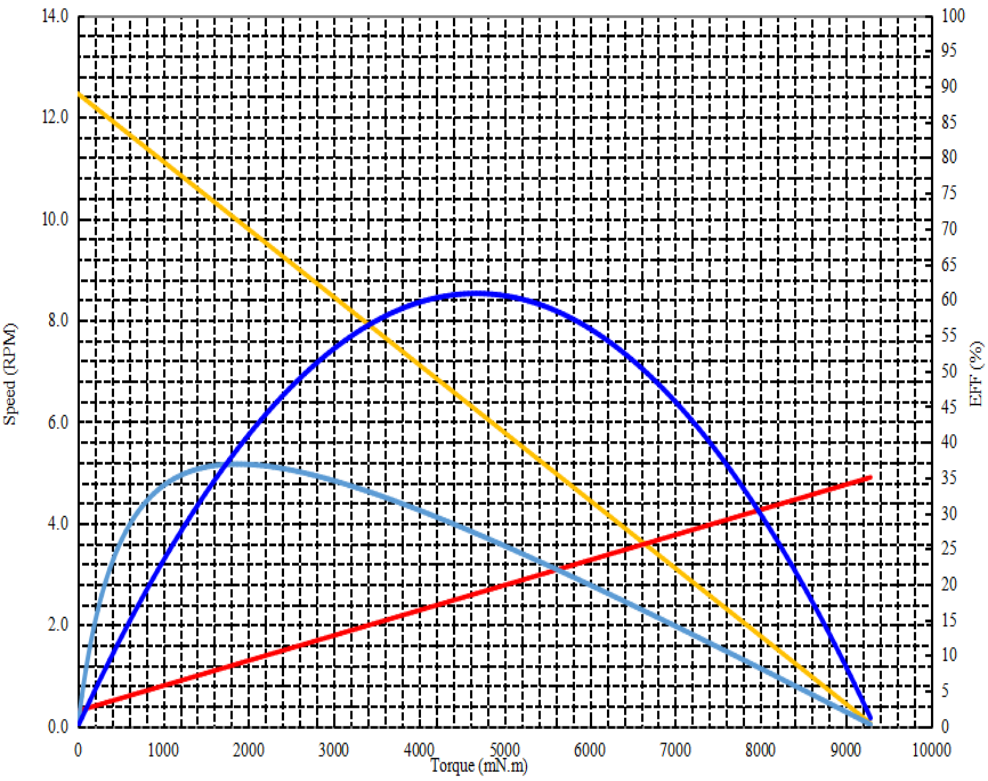
| Ροδακινό μοτόρας με καμπύ χάσμα Παράδειγμα καμπύς μοτόρας μείωσης | |||||||||||||||||||||
| έργο Όνομα εγχειρήματος : | Κινητήρας DC Gear | Χουρμάς Ημερομηνία : | 2025/3/26 | Απόδοση (σε περιβάλλον με θερμοκρασία 25-30 ℃ ) | |||||||||||||||||
| ταχύτητα κινητήρα Ταχύτητα : | 4600ΣΤΡ/ΛΕΠ | Πλήρης κλίμακα Διαπανέλιο : | 100% | Eff | Έλεγχος μεγάλης ταχύτητας για να προλαμβάνεται η αύξηση θερμοκρασίας και η ζημιά από υπερφορτίωση. | ||||||||||||||||
| Ζυγός λανθάνουσας Βαθμοί : | 4 | 5.0 | Βάτ | σταθερή τάση Σταθερή πίεση φορτίου : | 12 | Βολτ | |||||||||||||||
| Αναλογία κιβωτίου Λόγος μείωσης : | 369 | 5.0 | Αμπέρ. | Κατεύθυνση Κατεύθυνση : | CW/CCW | ||||||||||||||||
 |
|||||||||||||||||||||
| Στροφή Προβολή ροπής : | 4667.3 | mN-m | |||||||||||||||||||
| Ταχύτητα Ταχύτητα : | 6.2 | σ.α.λ. | |||||||||||||||||||
| Τρέχουσα Ρεύμα : | 0.93 | Αμπερ | |||||||||||||||||||
| Συνδυασμός παραγωγής Άλλα προσαρτήματα | |||||||||||||||||||||
| Αξεσουάρ Όνομα | Φορτίο θερμοκρασία | Ψήφισμα ανάλυση | Κανάλια Αριθμός καναλιών | Παρατήρηση | |||||||||||||||||
| Μαγνητικός Κωδικοποιητής μαγνητικός κωδικοποιητής | 5V-24V | 12ppr | A&B | ||||||||||||||||||

TJX38RGa

TJX36RGb

TJX38RGb

TJX36R3650BL
