
Schnellverweise






Nema 11 Lang d Welle 2 Phasen Schrittmotor Hohlwelle Nema 11 24nm Schrittmotor Mini für Roboter
 |
TYP | hybrid stepper motor | Erregungsfolge | |||||||||||||||||||
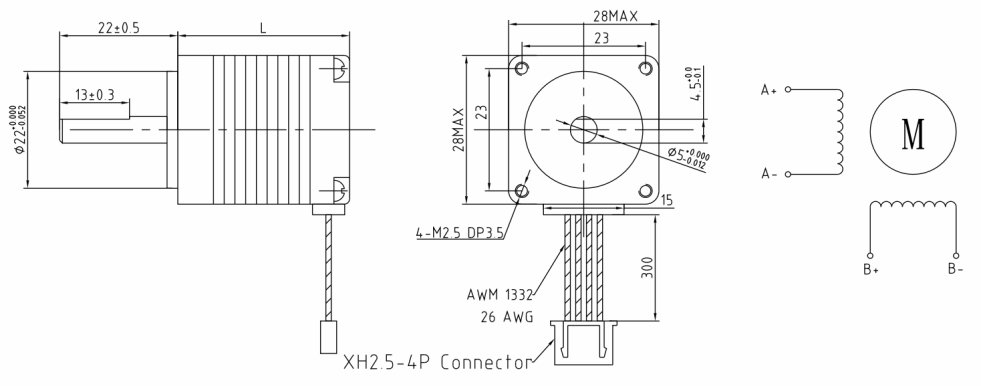
| Flanschgröße | 28mm Quadrat | |||||||||||||||||||||
| Phasen | 2 | |||||||||||||||||||||
| Schrittgenauigkeit | ±5% | Stufe | A+ | B+ | - Ich weiß. | - Ich weiß. | ||||||||||||||||
| Radiale Kraft | 30N(6,5Lbs.) am Wellenende | |||||||||||||||||||||
| IP-Bewertung | IP40 | 1 | + | + | - | - | ||||||||||||||||
| Betriebstemperatur | -20℃ bis +50 ℃ | 2 | - | + | + | - | ||||||||||||||||
| Isolationsklasse | B, 130 ℃ | 3 | - | - | + | + | ||||||||||||||||
| Isolationswiderstand | 100 MΩ | CW | 4 | + | - | - | + | Zcw | ||||||||||||||
| Abmessungen (mm) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| Technische Daten | ||||||||||||||||||||||
| Modell | Schrittwinkel | Motorlänge | Aktuell | Widerstand | Induktivität | Haltedrehmoment | Klickschalldrehmoment | Trägheit | Drähte | Gewicht | ||||||||||||
| (° ) | L(mm) | (A) | (Ω) | (mH) | (N·m) | (N·cm) | (g·cm²) | (Anz.) | (g) | |||||||||||||
| TH2828HS-6004 | 1.8 | 28 | 0.60 | 4.2 | 2.2 | 0.045 | 0.3 | 6.0 | 4 | 105 | ||||||||||||
| TH2833HS-3504 | 1.8 | 33 | 0.35 | 15.0 | 9.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2833HS-6004 | 1.8 | 33 | 0.60 | 5.5 | 3.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2845HS-7004 | 1.8 | 45 | 0.70 | 7.0 | 5.0 | 0.080 | 0.6 | 11.0 | 4 | 140 | ||||||||||||
| TH2845HS-9506 | 1.8 | 45 | 0.95 | 3.4 | 1.2 | 0.060 | 0.6 | 11.0 | 6 | 140 | ||||||||||||
| TH2851HS-6004 | 1.8 | 51 | 0.60 | 9.0 | 7.2 | 0.100 | 0.8 | 13.0 | 4 | 180 | ||||||||||||
| TH2851HS-9306 | 1.8 | 51 | 0.93 | 4.6 | 1.8 | 0.080 | 0.8 | 13.0 | 6 | 180 | ||||||||||||
| Drehmomentumrechnung: 1N·m≈10.2kgf·cm≈141.6oz·in≈8.85lb·in | ||||||||||||||||||||||
| Wenn Sie andere Parameter benötigen, wenden Sie sich bitte an den Kundenservice. | ||||||||||||||||||||||
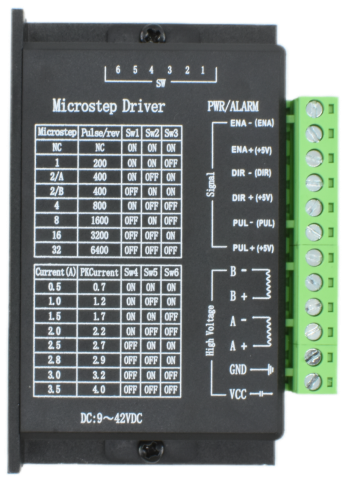
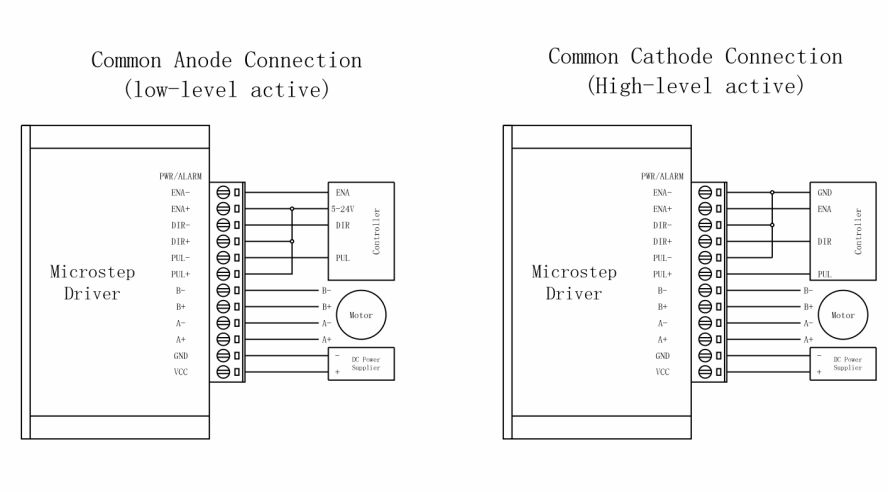
| Anschlüsse des Motorsteuersystems | ||||||||||||||||||||||
| ||||||||||||||||||||||

TJX36R3650BL

TJX36RGb

TJX38RGb

TJX38RGa
